Área: Engenharias
Subárea: Engenharia Elétrica
Estado: Rondônia
Cidade: Porto Velho
Escola: IFRO - CAMPUS PORTO VELHO CALAMA
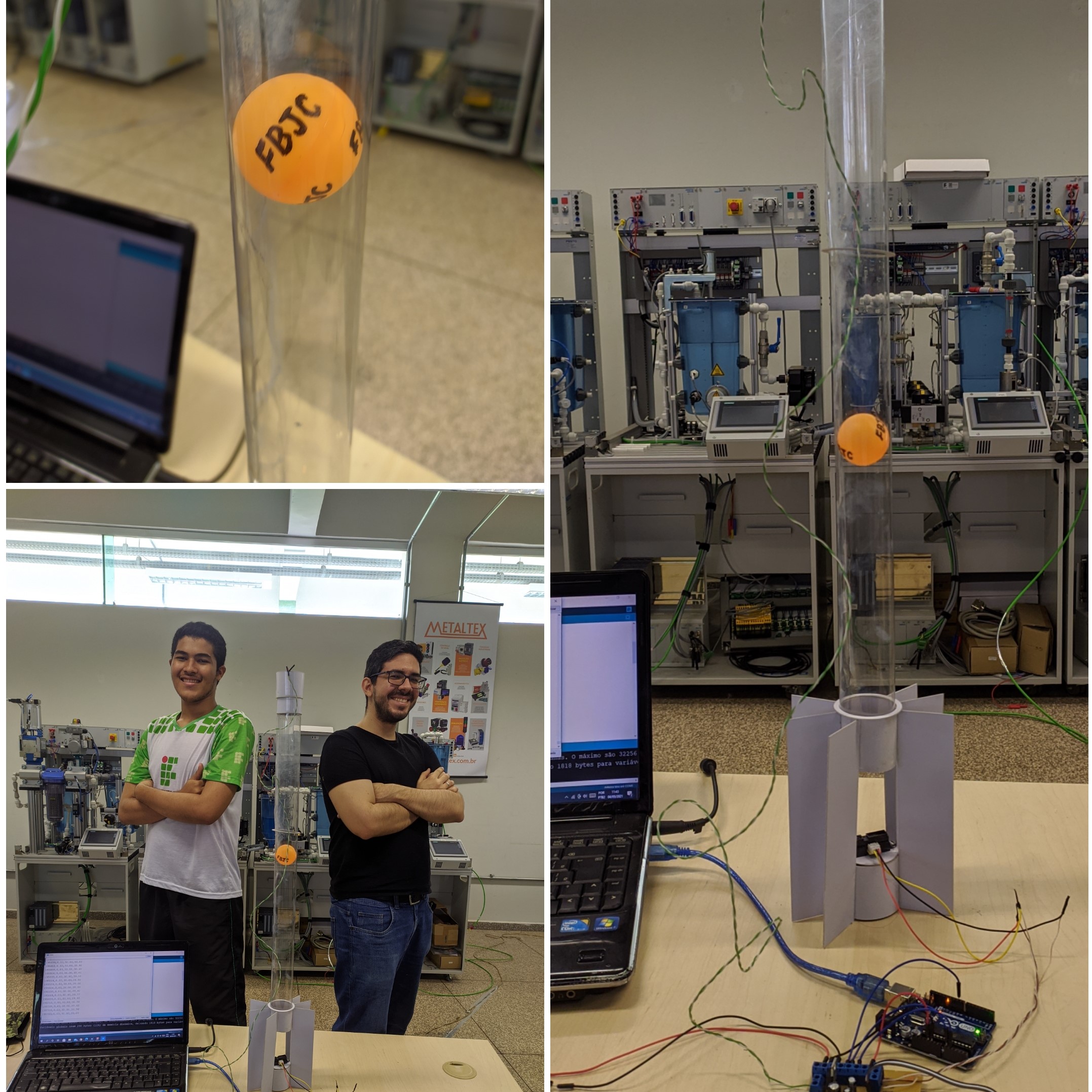
Resumo: Levitadores pneumáticos são dispositivos largamente utilizados para ensino e pesquisa na teoria de controle. Sua dinâmica não-linear e integradora impõe um desafio suficiente para gerar aprendizado e possibilitar validação de técnicas de controle. Enquanto a literatura tem se debruçado sobre um levitador convencional, o presente trabalho busca investigar o levitador pneumático reverso, sendo de modo que o ventilador sugue o objeto levitado ao invés de soprá-lo. O estudo obteve um modelo integrador por resposta ao degrau de modo a possibilitar o seu controle. Fez-se também através de programação C++ no Arduino, a sintonia de um controlador simples e demonstrou-se sua efetividade.